Импульсный стабилизатор напряжения с триггером шмитта и шим. ШИМ-регулятор
Потребовалось мне сделать регулятор скорости для пропеллера. Чтобы дым от паяльника сдувать, да морду лица вентилировать. Ну и, для прикола, уложить все в минимальную стоимость. Проще всего маломощный двигатель постоянного тока, конечно, регулировать переменным резистором, но найти резюк на такой малый номинал, да еще нужной мощности это надо сильно постараться, да и стоить он будет явно не десять рублей. Поэтому наш выбор ШИМ + MOSFET.
Ключ я взял IRF630
. Почему именно этот MOSFET
? Да просто у меня их откуда то завелось штук десять. Вот и применяю, так то можно поставить что либо менее габаритное и маломощное. Т.к. ток тут вряд ли будет больше ампера, а IRF630
способен протащить через себя под 9А. Зато можно будет сделать целый каскад из вентиляторов, подсоединив их к одной крутилке — мощи хватит:)
Теперь пришло время подумать о том, чем мы будем делать ШИМ
. Сразу напрашивается мысль — микроконтроллером. Взять какой-нибудь Tiny12 и сделать на нем. Мысль я эту отбросил мгновенно.
- Тратить такую ценную и дорогую деталь на какой то вентилятор мне западло. Я для микроконтроллера поинтересней задачу найду
- Еще софт под это писать, вдвойне западло.
- Напряжение питания там 12 вольт, понижать его для питания МК до 5 вольт это вообще уже лениво
- IRF630 не откроется от 5 вольт, поэтому тут пришлось бы еще и транзистор ставить, чтобы он подавал высокий потенциал на затвор полевика. Нафиг нафиг.
Операционные усилители можно отбросить сразу. Дело в том, что у ОУ общего назначения уже после 8-10кГц, как правило, предельное выходное напряжение
начинает резко заваливаться, а нам надо полевик дрыгать. Да еще на сверхзвуковой частоте, чтобы не пищало.
ОУ лишенные такого недостатка стоят столько, что на эти деньги можно с десяток крутейших микроконтроллеров купить. В топку!
Остаются компараторы, они не обладают способностью операционника плавно менять выходное напряжение, могут только сравнивать две напруги и замыкать выходной транзистор по итогам сравнения, но зато делают это быстро и без завала характеристики. Пошарил по сусекам и компараторов не нашел. Засада! Точнее был LM339 , но он был в большом корпусе, а впаивать микросхему больше чем на 8 ног на такую простую задачу мне религия не позволяет. В лабаз тащиться тоже было влом. Что делать?
И тут я вспомнил про такую замечательную вещь как аналоговый таймер — NE555
. Представляет собой своеобразный генератор, где можно комбинацией резисторов и конденсатором задавать частоту, а также длительность импульса и паузы. Сколько на этом таймере разной хрени сделали, за его более чем тридцатилетнюю историю… До сих пор эта микросхема, несмотря на почтенный возраст, штампуется миллионными тиражами и есть практически в каждом лабазе по цене в считанные рубли. У нас, например, он стоит около 5 рублей. Порылся по сусекам и нашел пару штук. О! Щас и замутим.
 |
Как это работает
Если не вникать глубоко в структуру таймера 555, то несложно. Грубо говоря, таймер следит за напряжением на конденсаторе С1, которое снимает с вывода THR
(THRESHOLD — порог). Как только оно достигнет максимума (кондер заряжен), так открывается внутренний транзистор. Который замыкает вывод DIS
(DISCHARGE — разряд) на землю. При этом на выходе OUT
появляется логический ноль. Конденсатор начинает разряжаться через DIS
и когда напряжение на нем станет равно нулю (полный разряд) система перекинется в противоположное состояние — на выходе 1, транзистор закрыт. Конденсатор начинает снова заряжаться и все повторяется вновь.
Заряд конденсатора С1 идет по пути: «R4->верхнее плечо R1 ->D2
«, а разряд по пути: D1 -> нижнее плечо R1 -> DIS
. Когда мы крутим переменный резистор R1 то у нас меняются соотношения сопротивлений верхнего и нижнего плеча. Что, соответственно, меняет отношение длины импульса к паузе.
Частота задается в основном конденсатором С1 и еще немного зависит от величины сопротивления R1.
Резистор R3 обеспечивает подтяжку выхода к высокому уровню — так так там выход с открытым коллектором. Который не способен самостоятельно выставить высокий уровень.
Диоды можно ставить любые совершенно, кондеры примерно такого номинала, отклонения в пределах одного порядка не влияют особо на качество работы. На 4.7нанофарадах, поставленных в С1, например, частота снижается до 18кГц, но ее почти не слышно, видать слух у меня уже не идеальный:(
Покопался в закромах, которая сама расчитывает параметры работы таймера NE555 и собрал схему оттуда, для астабильного режима со коэффициентом заполнения меньше 50%, да вкрутил там вместо R1 и R2 переменный резистор, которым у меня менялась скважность выходного сигнала. Надо только обратить внимание на то, что выход DIS (DISCHARGE) через внутренний ключ таймера подключен на землю, поэтому нельзя было его сажать напрямую к потенциометру , т.к. при закручивании регулятора в крайнее положение этот вывод бы сажался на Vcc. А когда транзистор откроется, то будет натуральное КЗ и таймер с красивым пшиком испустит волшебный дым, на котором, как известно, работает вся электроника. Как только дым покидает микросхему — она перестает работать. Вот так то. Посему берем и добавляем еще один резистор на один килоом. Погоды в регулировании он не сделает, а от перегорания защитит.
Сказано — сделано. Вытравил плату, впаял компоненты:
Снизу все просто.
Вот и печатку прилагаю, в родимом Sprint Layout —
А это напряжение на движке. Видно небольшой переходный процесс. Надо кондерчик поставить в параллель на пол микрофарады и его сгладит.
Как видно, частота плывет — оно и понятно, у нас ведь частота работы зависит от резисторов и конденсатора, а раз они меняются, то и частота уплывает, но это не беда. Во всем диапазоне регулирования она ни разу не влазит в слышимый диапазон. А вся конструкция обошлась в 35 рублей, не считая корпуса. Так что — Profit!
Использование схем сдвига уровня позволяет ШИМ-контроллеру управлять напряжением выше, чем его собственное напряжение питания.
Наиболее часто используемым импульсным стабилизатором является понижающий преобразователь напряжения, который эффективно преобразует высокое напряжение в низкое напряжение. На рис. 1 показана типичная схема понижающего преобразователя напряжения, в которой для затвора N-канального MOSFET-транзистора, Q 1 , требуется плавающее управляющее напряжение. Буфер сигнала с плавающим уровнем является частью ИС ШИМ (широтно-импульсная модуляция) контроллера. Транзистор Q 1 может быть как с N- так и с P-каналом, в зависимости от особенностей изготовления контроллера. В любом случае, напряжение питания ИС должно быть не ниже входного напряжения, что накладывает серьезные ограничения на величину входного напряжения в данной схеме.
В схеме на рис. 2 используется простейший каскад сдвига уровня, который позволяет управлять проходным транзистором понижающего преобразователя при помощи микросхемы контроллера с низким напряжением питания. Поскольку схема сдвига уровня изолирует ИС ШИМ от источника высокого напряжения, то по такому принципу можно строить преобразователи с произвольно большим входным напряжением.

ИС ШИМ с драйверами нижнего плеча может управлять N-канальными MOSFET-транзисторами, поскольку они имеют положительное управляющее напряжение между истоком и затвором. В схеме на рис. 2 используется P-канальный транзистор, как MOSFET-транзистор верхнего плеча; и для него управляющее напряжение между истоком и затвором должно быть отрицательным. Поэтому, следует инвертировать выходной сигнал от ШИМ-контроллера. Конфигурация ключа из комплементарных MOSFET-транзисторов Q 2 и Q 3 будет работать при любом типе проходного транзистора, хотя можно использовать и инвертирующий драйвер.
Конденсатор C 2 осуществляет сдвиг уровня. Его величина должна быть достаточно большой, чтобы удерживать заряд на частоте преобразования, но достаточно маленькой, чтобы, напряжение на нем следовало за изменениями входного напряжения. Через резистор R 1 и P-канальный MOSFET-транзистор Q 3 конденсатор C 2 заряжается до напряжения
V C =V IN -V CC ,
где V C - напряжение на C 2 , V IN - входное напряжение, и V CC напряжение питания комплементарной пары Q 2 и Q 3 и ИС ШИМ. Напряжение питания должно быть меньше, чем напряжение стабилизации стабилитрона D 2 . В противном случае, в те моменты, когда транзистор Q 2 будет находиться в открытом состоянии, через стабилитрон D 2 и конденсатор C 2 , что приведет к снижению КПД схемы. Стабилитрон D 2 ограничивает напряжение на C 2 до значения, получаемого из приведенной выше формулы. Когда транзистор Q 3 открыт, стабилитрон D 2 становится прямосмещенным, если напряжение пытается увеличиваться. Напряжение между истоком и затвором транзистора Q 1 в этой схеме равно 0 В, когда открыт транзистор Q 3 , и -V CC , когда открыт транзистор Q 2 .
Резистор R 1 гарантирует, что емкость затвор-исток транзистора Q 1 будет разряжаться, что позволит транзистору Q 1 оставаться в выключенном состоянии, когда на выходе буферного каскада присутствует высокое выходное напряжение. Стабилитрон D 2 ограничивает напряжение между истоком и затвором транзистора Q 1 на уровне 12 В, независимо от входного напряжения стабилизатора. Конденсатор C 2 сглаживает пульсации напряжения на затворе транзистора Q 1 , поэтому параметры схемы управления затвором будут такие же, как и параметры самой схемы комплементарного ключа. Поэтому, схема сдвига уровня не налагает никаких ограничений на используемый MOSFET-транзистор.
На рис. 3 изображена практическая схема понижающего преобразователь напряжения, использующего рассмотренный принцип управления проходным транзистором. Входное напряжение преобразователя может находиться в диапазоне от 18 В до 45 В, при выходном напряжении 12 В и максимальном токе нагрузки 1,5 А. В преобразователе использована микросхема LM5020-1 прямо- и обратноходового ШИМ-контроллера компании National Semiconductor.
На рассматриваемой схеме имеются все те же компоненты, что и на предыдущих схемах, но добавлены еще некоторые функции, такие как: фильтрация входного напряжения конденсатором C 9 ; ограничение бросков входного напряжения резисторами R 2 и R 7 ; обеспечение мягкого запуска с помощь конденсатора C 3 ; возможность регулировки частоты преобразования резистором R3 (для частоты 500 кГц его значение будет составлять 12.7 кΩ); компенсация обратной связи конденсаторами C 7 , C 8 , и резистором R 6 ; и подстройка значения выходного напряжения резисторами R 9 и R 10 .
Микросхема LM5020-1 предназначена для работы в режиме токового управления, но, в этой схеме, работает в режиме управления напряжения. Внутренний источник образцового тока с пиковым значением 50 А, который компенсирует нелинейность токового сигнала, используется для генератора пилообразного напряжения. Этот ток, протекая через резистор R 4 , сопротивлением 5.11 кΩ и внутренний резистор сопротивлением 2 кΩ, служит для генерации пилообразного сигнала, с напряжением от пика до пика (50 ´А×2 кΩ+5.11 кΩ)≈300 мV на выходе CS (вывод 8). На выводе COMP, (вывод 3), этот пилообразный сигнал сравнивается с выходным напряжением ошибки с вывода COMP, в результате чего генерируется сигнал с необходимой шириной импульса для управления проходным транзистором Q 1 .

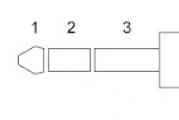
На рис. 4 показаны эпюры напряжений для рассматриваемой схемы. Канал 1 осциллографа (верхний график) показывает управляющий сигнал, который генерирует микросхема LM5020-1. Канал 2 (средний график) показывает соответствующее напряжение на выходе двухтактного буферного каскада. Канал 3 (нижний график) сдвинутое по уровню выходное напряжение двухтактного каскада, приложенное между затвором и истоком транзистора Q 1 . Пиковое значение напряжения исток-сток транзистора Q 1 равно входному напряжению, и его амплитуда на 8 В превышает, значение управляющего сигнала, который выдает микросхема LM5020-1. Все сигналы чистые и имеют малое время нарастания и спада. КПД данной схемы составляет 86% и 83% при входном напряжении 18 В и 45 В, соответственно.
Сам принцип широтно-импульсного моделирования (ШИМ) известен уже давно, но применяться в различных схемах он стал относительно недавно. Он является ключевым моментом для работы многих устройств, используемых в различных сферах: источники бесперебойного питания различной мощности, частотные преобразователи, системы регулирования напряжения, тока или оборотов, лабораторные преобразователи частоты и т.д. Он прекрасно показал себя в автомобилестроении и на производстве в качестве элемента для управления работой как сервисных, так и мощных электродвигателей. ШИМ-регулятор хорошо зарекомендовал себя при работе в различных цепях.
Давайте рассмотрим несколько практических примеров, показывающих, как можно регулировать скорость вращения электродвигателя с помощью электронных схем, в состав которых входит ШИМ-регулятор. Предположим, что вам необходимо изменить обороты электродвигателя в системе отопления салона вашего автомобиля. Достаточно полезное усовершенствование, не правда ли? Особенно в межсезонье, когда хочется регулировать температуру в салоне плавно. Двигатель постоянного тока, установленный в этой системе, позволяет изменять обороты, но необходимо повлиять на его ЭДС. С помощью современных электронных элементов эту задачу легко выполнить. Для этого в двигателя включается мощный полевой транзистор. Управляет им, как вы уже догадались, ШИМ- С его помощью можно менять обороты электродвигателя в широких пределах.

Каким образом работает ШИМ-регулятор в цепях В этом случае используется несколько иная схема регулирования, но принцип работы остается тем же. В качестве примера можно рассмотреть работу частотного преобразователя. Такие устройства широко применяются на производстве для регулирования скорости двигателей. Для начала трехфазное напряжение выпрямляется с помощью моста Ларионова и частично сглаживается. И только после этого подается на мощную двуполярную сборку или модуль на базе полевых транзисторов. Управляет же им собранный на базе микроконтроллера. Он и формирует контрольные импульсы, их ширину и частоту, необходимую для формирования определенной скорости электродвигателя.

К сожалению, помимо хороших эксплуатационных характеристик, в схемах, где используется ШИМ-регулятор обычно появляются сильные помехи в силовой цепи. Это связано с наличием индуктивности в обмотках электродвигателей и самой линии. Борются с этим самыми разнообразными схемными решениями: устанавливают мощные сетевые фильтры в цепях переменного тока или ставят обратный диод параллельно двигателю в цепях постоянного электропитания.
Такие схемы отличаются достаточно высокой надежностью в работе и являются инновационными в сфере управления электроприводами различной мощности. Они достаточно компактны и хорошо управляемы. Последние модификации таких устройств широко применяются на производстве.
Общим недостатком компенсационных стабилизаторов напряжения является низкий КПД из-за потерь в транзисторах регулирующего элемента, что, кроме того, требует мощных теплоотводов, значительно превышающих по габаритам и массе сами стабилизаторы. Более прогрессивным техническим решением являются импульсные стабилизаторы напряжения (ИСН), в которых транзисторы регулирующих элементов работают в ключевом режиме. При использовании высокочастотных транзисторов проблема КПД и массо-габаритных характеристик в таких стабилизаторах решается достаточно радикально.
Существуют три основные схемы ИСН : последовательный ИСН понижающего типа (рис. 12.15), параллельный ИСН повышающего (рис. 12.16) и параллельный инвертирующего (рис. 12. 17) типа. Все три схемы содержат накопительный дроссель L, регулирующий элемент 1, блокировочный диод VD, элементы управления 2, 3 и конденсатор фильтра С.
Импульсный последовательный стабилизатор понижающего типа выполняется по структурной схеме, приведенной на рис. 12.15, в которой регулирующий элемент 1 и дроссель L включены последовательно с нагрузкой Rn. В качестве РЭ используется транзистор, работающий в ключевом режиме. При открытом в течение времени Т„ транзисторе энергия от входного источника постоянного тока Ui (или выпрямителя с выходным напряжением Uo) передается в нагрузку через дроссель L, в котором накапливается энергия. При закрытом в течение времени Тп транзисторе накопленная в дросселе энергия через диод VD передается в нагрузку. Период коммутации (преобразования) равен Т=Ти+Тп. Частота коммутации (преобразования) F=1/T. Отношение длительности открытого состояния транзистора, при котором генерируется импульс напряжения длительностью Ти, к периоду коммутации Т называется коэффициентом заполнения Кз=Ти/Т.
Таким образом, в импульсном стабилизаторе регулирующий элемент 1 преобразует (модулирует) входное постоянное напряжение Ui в серию последовательных импульсов определенной длительности и частоты, а сглаживающий фильтр, состоящий из диода VD, дросселя L и конденсатора С, демодулирует их в постоянное напряжение Uo. При изменении выходного напряжения Uo или тока в нагрузке Rn в импульсном стабилизаторе с помощью цепи обратной связи, состоящей из измерительного элемента 3 и схемы управления 2, длительность импульсов изменяется таким образом, чтобы выходное напряжение Uo оставалось неизменным (с определенной степенью точности).
Импульсный режим работы позволяет существенно уменьшить потери в регулирующем элементе и тем самым повысить КПД источника питания, уменьшить его массу и габариты. В этом состоит основное преимущество импульсных стабилизаторов перед компенсационными стабилизаторами непрерывного действия.
Импульсный параллельный стабилизатор (повышающего типа) выполняется по структурной схеме на рис. 12.16, в которой регулирующий элемент 1 подключен параллельно нагрузке Rn. Когда регулирующий транзистор открыт, ток от источника питания Ui протекает через дроссель L, запасая в нем энергию. Диод VD при этом находится в закрытом состоянии и поэтому не позволяет конденсатору С разрядиться через открытый регулирующий транзистор. Ток в нагрузку в этот промежуток времени поступает только от конденсатора С. В момент времени, когда регулирующий транзистор закрывается, ЭДС самоиндукции дросселя L суммируется с входным напряжением и энергия дросселя передается в нагрузку, при этом выходное напряжение оказывается больше входного напряжения питания Ui. В отличие от схемы на рис. 12.15 здесь дроссель не является элементом фильтра, а выходное напряжение становится больше входного на величину, определяемую индуктивностью дросселя L и временем открытого состояния регулирующего транзистора (или скважностью управляющих импульсов).
Схема управления стабилизатором на рис. 12.16 построена таким образом, что, например, при повышении входного напряжения питания Ui уменьшается длительность открытого состояния регулирующего транзистора на такую величину, что выходное напряжение Uo остается неизменным.
Импульсный параллельный инвертирующий стабилизатор выполняется по структурной схеме, приведенной на рис. 12.17. В отличие от схемы на рис. 12.16 здесь дроссель L включен параллельно нагрузке Rn, а регулирующий элемент 1 - последовательно с ней. Блокирующий диод отделяет конденсатор фильтра С и нагрузку Rn от регулирующего элемента по постоянному току. Стабилизатор обладает свойством изменения (инвертирования) полярности выходного напряжения Uo относительно полярности входного напряжения питания.
Импульсные стабилизаторы в зависимости от способа управления регулирующим транзистором могут выполняться с широтно-импульсной модуляцией (ШИМ), частотно-импульсной модуляцией (ЧИМ) или релейным управлением. В ШИМ-ста-билизаторах в процессе работы изменяется длительность импульса Ти, а частота коммутации остается неизменной; в ЧИМ-стабилизаторах изменяется частота коммутации, а длительность импульса Ти остается постоянной; в релейных стабилизаторах в процессе регулирования напряжения изменяется как длительность импульсов, так и частота их следования.
Наибольшее распространение на практике получил последовательный ИСН (рис. 12.15), в котором накопительный дроссель одновременно является элементом сглаживающего LC-фильтра. В стабилизаторах на рис. 12.16 и 12.17 дроссель L не участвует в сглаживании пульсации выходного напряжения. В этих схемах сглаживание пульсации достигается только за счет увеличения емкости конденсатора С, что приводит к увеличению массы и габаритов фильтра и устройства в целом.
Статическая регулировочная характеристика, определяемая для стабилизатора на рис. 12.15 по формуле Uo/Ui=Kз (1 - Кг), представляет собой прямую, наклон которой зависит (без учета потерь в регулирующем транзисторе и диоде) от отношения активных сопротивлений дросселя и нагрузки Kг=Rd/Rn. Напряжение Uo на нагрузке определяется относительной длительностью управляющих импульсов (при постоянном Ui) и не может быть больше напряжения питания, а линейность данной характеристики соответствует условиям устойчивой работы ИСН.
Рассмотрим основные элементы ИСН на рис. 12.15. Начнем с основного блока, схема которого показана на рис. 12.18.

Блок включает в себя силовую часть и регулирующий элемент на транзисторе VT1, управляемый ключом на транзисторе VT2 (диод VD2 служит для защиты базового перехода VT2 при большом отрицательном входном сигнале управления). Сопротивление резистора R1 выбирается из условия обеспечения закрытого состояния транзистора VT1 (100...900 Ом), a R2 - ориентировочно из условия kbUi=R2 Ikmax где k=l,5...2 - коэффициент запаса по насыщению; b, Ikmax - коэффициент усиления тока и максимальный импульсный коллекторный ток транзистора VT1. Аналогичным образом выбирается сопротивление резистора R3, но при этом в расчетах Ui заменяется амплитудой управляющего импульса функционального генератора. Отметим, что при выборе количества транзисторов РЭ можно руководствоваться рекомендациями, приведенными для схемы на рис. 12.12.
Исходными данными для выбора параметров схемы на рис. 12.18 являются:
напряжение Ui и пределы его изменения; внутреннее сопротивление Ri источника Ui; номинальное выходное напряжение стабилизатора Uo и допустимые пределы его регулировки; максимальный Inmax и минимальный Imin токи нагрузки, допустимая амплитуда пульсации выходного напряжения стабилизатора; коэффициент стабилизации Кn и внутреннее сопротивление Ro; максимальный температурный уход напряжения Uo и др. Порядок выбора параметров следующий:
1. Выбираем частоту преобразования F (до 100 кГц, для модели - единицы килогерц) и принимаем ориентировочно КПД=0,85...0,95.
2. Определяем минимальное и максимальное значения относительной длительности (коэффициента заполнения) импульса напряжения на входе фильтра:
3. Из условия сохранения режима непрерывности токов дросселя определяем его
минимальную индуктивность
4. Вычисляем произведение LC по заданному значению напряжения пульсации U„
откуда затем находим емкость конденсатора С.
Произведение LC определяет не только уровень пульсации, но и характер переходных процессов выходного напряжения после включения стабилизатора.
На рис. 12.19 показаны результаты моделирования схемы на рис. 12.18 при следующих данных: F=1 кГц, К,=0,5, Rn=100 Ом, L=200 мГн, С=100 мкФ (для рис. 12.19, а) и С=1 мкФ (для рис. 12.19, б). Как видно из рисунков, при сравнительно большом значении произведения LC переходная характеристика исследуемой схемы имеет колебательный характер, что приводит к скачкам выходного напряжения, которые могут оказаться опасными для потребителя (нагрузки).

Перейдем к рассмотрению следующего функционального узла ИСН - схемы управления и измерительного элемента. При этом целесообразно рассмотреть характеристики используемых в ИСН модуляторов.
Импульсные стабилизаторы с ШИМ по сравнению со стабилизаторами двух других типов имеют следующие преимущества:
О обеспечивается высокий КПД и оптимальная частота преобразования независимо от напряжения первичного источника питания и тока нагрузки; частота пульсации на нагрузке является неизменной, что имеет существенное значение для ряда потребителей электроэнергии;
О реализуется возможность одновременной синхронизации частот преобразования неограниченного числа ИСН, что исключает опасность возникновения биений частот при питании нескольких ИСН от общего первичного источника постоянного тока. Кроме того, при работе ИСН на нерегулируемый преобразователь (например, усилитель мощности) возможна синхронизация частот обоих устройств.
Недостатком ИСН с ШИМ по сравнению со стабилизатором релейного типа является более сложная схема управления, содержащая обычно дополнительный задающий генератор.
Импульсные стабилизаторы с ЧИМ, не имея существенных преимуществ перед другими типами ИСН, обладают следующими недостатками:
О сложность реализации регуляторов частоты в широких пределах, особенно при больших изменениях напряжения питания и тока нагрузки;
О отсутствие возможности реализации отмеченных выше преимуществ системы регулирования с ШИМ.
Последний недостаток относится и к релейным (или двухпозиционным) ИСН, которые характеризуются также сравнительно большой пульсацией напряжения на нагрузке (в стабилизаторах с ШИМ или ЧИМ пульсации выходного напряжения принципиально могут быть сведены к нулю, что невозможно достичь в релейных стабилизаторах).
В общем случае блок 3 (рис. 12.20) содержит делитель напряжения, источник опорного напряжения ИОН, сравнивающий элемент и усилитель рассогласования. Эти элементы выполняют такие же функции, что и в компенсационных стабилизаторах. Для ИСН с ШИМ к этим устройствам добавляются формирователь синхронизирующего напряжения (задающий генератор) и пороговое устройство, с помощью которых осуществляется формирование модулированных по длительности импульсов. Изменение длительности управляющего импульса осуществляется модуляцией его переднего или заднего фронта.

При модуляции переднего фронта линейно изменяющееся напряжение синхронизации на каждом периоде нарастает, а при модуляции заднего фронта управляющее напряжение в каждом периоде уменьшается. При модуляции фронтов напряжение синхронизации на каждом периоде нарастает и спадает. Этот вид модуляции по сравнению с односторонней модуляцией позволяет реализовать более быстродействующие ИСН, так как в этом случае мгновенное значение управляющего напряжения влияет на формирование фронтов.
Коэффициент передачи схемы управления, устанавливающий связь между изменениями относительной длительности импульсов на входе сглаживающего фильтра и напряжения на нагрузке (для ШИМ), равен
коэффициенты передачи делителя напряжения и усилителя рассогласования соответственно; Uy - амплитуда синхронизирующего напряжения.
Полная схема ИСН с элементами ШИМ показана на рис. 12.20. Делитель напряжения выполнен на резисторах R3, R4, источник опорного напряжения - на резисторе R5 и стабилитроне VD2, усилитель сигнала рассогласования - на OU1, пороговое устройство - на OU2. Поскольку оба ОУ питаются от однополярного источника, для согласования уровней в ключевом каскаде на VT2 в эмиттерную цепь включен параметрический стабилизатор (VD3, R8). В качестве задающего использован функциональный генератор в режиме треугольных импульсов; при модуляции по переднему фронту коэффициент заполнения (Duty cycle) выбирается максимальным (99%), при модуляции по заднему фронту - минимальным (0,1%), при модуляции по обоим фронтам - 50%. На рис. 12.21 показан результат моделирования процесса формирования управляющих импульсов при модуляции по переднему фронту.

Приведенные на рис. 12.21 результаты получены при Rn=100 Ом и Ui = 20 В. Как видно из рис. 12.21, сразу после включения источника питания формируются импульсы управления максимальной длительности, затем наступает продолжительная пауза из-за положительного скачка выходного напряжения Uo, затем опять идетт форсированный режим из-за отрицательного скачка Uo. Установившийся режим формирования управляющего импульса наступает через несколько периодов управляющего сигнала задающего генератора.
Контрольные задания
1. Для схемы на рис. 12.18 получите зависимость Uo=f(K,) при F=1 кГц, Uy=3 В (однополярность управляющих прямоугольных импульсов обеспечивается установкой на функциональном генераторе постоянной составляющей Offset=3 В, коэффициент заполнения К. задается выбором параметра Duty cycle), Ui=30 В, Rn=100 Ом, L=100 мГн, С=100 мкФ.
2. Для схемы на рис. 12.18 исследуйте зависимость формы переходных процессов от активного сопротивления потерь Rd включая последовательно с дросселем сопротивление 0,1... 10 Ом.
3. Исследуйте ИСН по схеме рис. 12.20 при модуляции заднего фронта, одновременно по переднему и заднему фронту и сравните результаты по времени выхода устройств в установившийся режим.
4. Для каждого способа формирования управляющих сигналов в установившемся режиме получите зависимость периода формирования управляющих сигналов от сопротивления нагрузки Rn в диапазоне 10... 1000 Ом и входного напряжения Ui в диапазоне 15...40 В.