Практическое использование интерфейса USB в PIC контроллерах. Создаем простейшее usb-устройство для общения со своей программой Программирование работы с usb
Шина USB (Universal Serial Bus – универсальная последовательная шина) появилась 15 января 1996 года при утверждении первого варианта стандарта фирмами – Intel, DEC, IBM, NEC, Northen Telecom и Compaq.
Основная цель стандарта, поставленная перед его разработчиками – создать возможность пользователям работать в режиме Plug&Play с периферийными устройствами. Это означает, что должно быть предусмотрено подключение устройства к работающему компьютеру, автоматическое распознавание его немедленно после подключения и последующей установки соответствующих драйверов. Кроме этого, желательно питание маломощных устройств подавать с самой шины. Скорость шины должна быть достаточной для подавляющего большинства периферийных устройств. Контроллер USB должен занимать только одно прерывание независимо от количества подключенных к шине устройств, то есть решить проблему нехватки ресурсов на внутренних шинах IBM PC совместимого компьютера.
Практически все поставленные задачи были решены в стандарте на USB и весной 1997 года стали появляться компьютеры, оборудованные разъемами для подключения USB устройств. Сейчас USB стала настолько активно внедряться производителями компьютерной периферии, что, например, в компьютере iMAC фирмы Apple Computers присутствует только USB в качестве внешней шины.
Возможности USB 1.0 следующие:
1. высокая скорость обмена данными (full-speed) – 12 Мбит /с;
2. максимальная длина кабеля для высокой скорости обмена – 5 метров;
3. низкая скорость обмена данными (low-speed) – 1,5 Мбит /с;
4. максимальная длина кабеля для низкой скорости обмена – 3 метра;
5. максимальное количество подключенных устройств – 127;
6. возможное одновременное подключение устройств с различными скоростями обмена;
8. максимальный ток потребления на одно устройство – 500 мА.
Поэтому целесообразно подключать к USB 1.0 практически любые периферийные устройства, кроме цифровых видеокамер и высокоскоростных жестких дисков. Особенно удобен этот интерфейс для подключения часто подключаемых/отключаемых приборов, таких как цифровые фотокамеры.
Возможность использования только двух скоростей обмена данными ограничивает применяемость шины, но существенно уменьшает количество линий интерфейса и упрощает аппаратную реализацию.
Питание непосредственно от USB возможно только для устройств с малым потреблением, таких как клавиатуры, мыши, джойстики и т.п.
Сигналы USB передаются по 4-х проводному кабелю, схематично показанному на рисунке ниже:
Рисунок 2.6.1 – Сигнальные провода USB
Здесь GND – цепь общего провода для питания периферийных устройств, Vbus - +5 В также для цепей питания. Шина D+ предназначена для передачи данных по шине, а шина D- для приема данных.
Кабель для поддержки полной скорости шины (full-speed) выполняется как витая пара, защищается экраном и может также использоваться для работы в режиме минимальной скорости (low-speed). Кабель для работы только на минимальной скорости (например, для подключения мыши) может быть любым и неэкранированным.
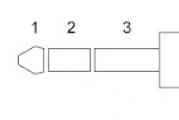
Разъемы, используемые для подключения периферийных устройств, делятся на серии: разъемы серии «A» (вилка и розетка) предназначены только для подключения к источнику, например, компьютеру, разъемы серии «B» (вилка и розетка) только для подключения к периферийному устройству.
USB разъемы имеют следующую нумерацию контактов, показанную в таблице 2.6.1.
Таблица 2.6.1 – Назначение и маркировка контактов USB
В 1999 году тот же консорциум компьютерных компаний, который инициировал разработку первой версии стандарта на шину USB, начал активно разрабатывать версию 2.0 USB, которая отличается введением дополнительного высокоскоростного (Hi-speed) режима. Полоса пропускания шины увеличена в 40 раз, до 480 Мбит/с, что сделало возможным передачу видеоданных по USB.
Совместимость всей ранее выпущенной периферии и высокоскоростных кабелей полностью сохраняется. Контроллер стандарта 2.0 уже интегрирован в набор системной логики программируемых устройств (например, материнская плата персонального компьютера).
В 2008 году компаниями Intel, Microsoft, Hewlett-Packard, Texas Instruments, NEC и NXP Semiconductors создана спецификация стандарта USB 3.0. В спецификации USB 3.0 разъёмы и кабели обновлённого стандарта физически и функционально совместимы с USB 2.0, однако в дополнение к четырем линиям связи, добавлены ещё четыре. Тем не менее, новые контакты в разъёмах USB 3.0 расположены отдельно от старых на другом контактном ряду. Спецификация USB 3.0 повышает максимальную скорость передачи информации до 5 Гбит/с - что на порядок больше 480 Мбит/с, которые может обеспечить USB 2.0. Кроме того, увеличена максимальная сила тока с 500 мА до 900 мА на одно устройство, что позволяет питать некоторые устройства, требующие ранее отдельного блока питания.
Предположим, разработано устройство USB, с которым необходимо работать с помощью компьютера. Этого можно достигнуть минимум двумя способами:
1. разработка полнофункционального драйвера операционной системы;
2. использования интерфейса специального класса USB – устройств, называемых HID (Human Interface Device) устройствами.
Первый способ универсален: владея достаточными познаниями в области написания драйверов, можно запрограммировать работу с любым устройством на любой скорости, поддерживаемой USB. Но это достаточно непростая задача.
Второй способ заключается в следующем. Существует поддерживаемый современными операционными системами интерфейс для устройств взаимодействия компьютера и человека или HID-устройств, таких как:
1. клавиатуры, мыши, джойстики;
2. различные датчики и считыватели;
3. игровые рулевое управление и педали;
4. кнопки, переключатели, регуляторы.
Любое такое устройство, если оно выполняет требования к HID-устройствам, будет автоматически распознано системой и не потребует написания специальных драйверов. Кроме того, их программирование, как правило, намного проще написания специализированного драйвера устройства. К сожалению, способ имеет существенный недостаток: скорость обмена информации с HID-устройством сильно ограничена и составляет максимум 64 кБ/с.
Принципиально на основе HID-технологии можно организовать взаимодействие с любым устройством, даже если оно не является в строгом смысле интерфейсным устройством человека и компьютера. Это позволяет отказаться от трудоемкой разработки уникального драйвера устройства и сэкономить время на разработку нового USB-устройства. На стороне хоста обменом с устройством будет руководить стандартный HID-драйвер, включенный в поставку операционной системы. Нужно лишь выполнить со стороны устройства минимальные требования USB-HID протокола.
Стоит отметить что, многие USB-приборы, с первого взгляда не попадающие под определение устройств взаимодействия с человеком, логичнее все же реализовать как HID-устройства. Такое явление часто встречается в области производственного оборудования, которая последнее время переживает массовое внедрение USB-технологий. К примеру, рассмотрим лабораторный источник питания с возможностью задания параметров его выходных сигналов с компьютера с помощью USB-интерфейса. Непосредственно источник питания без сомнений не является средством взаимодействия с человеком. Однако, в данном случае функции, реализуемые посредством USB-подключения, дублируют клавиатуру, регуляторы и индикаторы, установленные на самом приборе. А эти органы управления как раз попадают под определение HID. Соответственно блок питания с этими USB-функциями логичнее всего организовать как HID-устройство.
В рассмотренном примере для нормальной работы достаточно будет небольшой скорости передачи данных, в других же случаях приборы могут быть весьма требовательны к скорости обмена. Низкая скорость передачи является главным ограничением HID-варианта построения устройства, что в сравнении с 12 Мбит/сек полной скорости USB 1.0-шины выглядит большим минусом HID-технологии в вопросе выбора конкретной USB-реализации. Однако для многих задач коммуникации указанной скорости вполне хватает и HID-архитектура как специализированный инструмент занимает достойное место среди способов организации обмена данными.
HID-устройства бывают двух типов: участвующие (загрузочные) и неучаствующие в начальной загрузке компьютера. Наиболее ярким примером загрузочного USB-HID устройства является клавиатура, работа которой начинается со стартом компьютера.
При разработке HID-устройства необходимо обеспечить следующие требования, налагаемые спецификацией:
1. полноскоростное HID-устройство может передавать 64000 байт каждую секунду или по 64 байта каждые 1 мс; низкоскоростное HID-устройство имеет возможность передать вплоть до 800 байт в секунду или по 8 байт каждые 10 мс.
2. HID-устройство может назначить частоту своего опроса для определения того, есть ли у него свежие данные для передачи.
3. Обмен данными с HID-устройством осуществляется посредством специальной структуры, называемой репортом (Report). Каждый определенный репорт может содержать до 65535 байт данных. Структура репорта имеет весьма гибкую организацию, позволяющую описать любой формат передачи данных. Для того чтобы конкретный формат репорта стал известен хосту микроконтроллер должен содержать специальное описание – дескриптор репорта.
Реализуется USB взаимодействие непосредственно на микроконтроллере несколькими способами:
1. использованием контроллера с аппаратной поддержкой, например AT90USB*, фирмы atmega;
2. использованием программной эмуляции usb-интерфейса на любом микроконтроллере.
Для программной реализации в настоящее время существует ряд готовых решения под различные семейства микроконтроллеров. Для AVR микроконтроллеров, например, Atmega8 возможно использовать следующие свободные библиотеки на языке Си:
Обе достаточно простые в использовании, обеспечивают полную эмуляция USB 1.1 low-speed устройств за исключением обработки ошибок связи и электрических характеристик и запускаются практически на всех AVR контроллерах с минимум 2 килобайтами flash-памяти, 128 байтами RAM и частотой от 12 до 20 МГц.
Для написания приложений с поддержкой Windows USB HID устройств требуются заголовочные файлы hid*, входящие в состав WDK (Windows Driver Kit), или можно использовать свободно-распространяемую библиотеку hidlibrary или другую аналогичную.
Таким образом, в общем случае программирование USB достаточно сложная задача, требующая специального микроконтроллера с аппаратной поддержкой и написания драйвера операционной системы. Однако в практике при разработке устройств можно использовать значительно более просто интерфейс HID – устройств, поддержка которого реализована на уровне стандартного драйвера системы, а программирование упрощается использованием существующих библиотек функций.
- В чем отличие провода D- и GND в USB? Почему нельзя использовать один общий провод для питания и сигнала?
- Сколько режимов скорости работы USB существует на сегодняшний день (включая версию 3.0)?
- Что такое HID-устройство? Почему для их работы в современных ОС не требуется написание драйверов?
- Можно ли реалировать USB устройства с помощью микропроцессора, неимеющего встроенной поддержки интерфейса?
- Какие основные отличия USB 3.0 от предыдущих версий?
Программирование через порт USB
Программирование прибора для настройки спутниковых антенн SF-50 через порт USB отличается от программирования через порт RS-232 только способом передачи данных с прибора на компьютер и с компьютера на прибор. При программировании через USB задействуется портативный USB накопитель (флешка). Это удобно когда, например, ваш компьютер или, чаще, ноутбук (нетбук) не имеет на своем шасси последовательного RS-232 порта.
Для программирования прибора с использованием USB накопителя понадобятся:
- USB накопитель (флешка), отформатированная в файловую систему FAT-32;
- программа-редактор AliEditor, находится в папке Database_editor_new раздела софт прибора OPENBOX SF-50.
Перед началом программирования необходимо базу данных с прибора перенести на компьютер. Для этого включить прибор, подключить к порту USB флешку. Выполнить MENU – Система – Сохранить на USB,

Выйти из меню нажатием кнопки MENU до появления текущего канала, или до картинки главного меню, если каналы пока отсутствуют и извлечь флешку. Вставить флешку в компьютер.
Запустить программу Editor.exe из папки Database_editor_new и открыть в ней имидж на флешке.

На запрос о выборе базы данных выбрать User Data Base.

Нажать ОК. Выбрать All Services, откроется список всех имеющихся в базе просканированных и сохраненных теле, радио и сервисных каналов.

Отредактировать каналы по своему усмотрению, например, оставить только открытые каналы.
На клавиатуре компьютера зажать кнопку Shift, нажать «Стрелка вниз» и выделить каналы, которые нужно удалить. Нажажать Delete для удаления выбранного.

Для редактирования параметров настройки на спутник, выбрать All Services – Satellite Information – EUTELSAT W4, W7, нажать кнопку ENTER.

При необходимости отредактировать значения в Antenna 1.
Для удаления транспондера встать на ненужный и нажать кнопку Delete на клавиатуре компьютера, подтвердить выбранное действие.

Для добавления транспондера встать на название спутника, нажать правую кнопку мыши и выбрать Add Information (или выделив спутник нажать кнопку Insert на клавиатуре).

Ввести данные по новому транспондеру, взяв их, например, на сайте lyngsat.com.


Нажать ОК, убедиться, что транспондер прописался.

Для добавления спутника, встать на строку Satellite Information, нажать клавишу Insert на клавиатуре и ввести параметры нового спутника.


закрыть программу-редактор, извлечь накопитель.
Вставить накопитель в прибор OPENBOX SF-50, выполнить последовательно MENU – Система – Обновление с USB, выбрать режим «Список SAT&TP».

Выбрать Начать. Подтвердить свои намерения.

Прибор обновит базу и самостоятельно перезагрузится. После перезагрузки в настройках придется по-новому установить русский язык меню. Сбросить прибор в заводские настройки.
Выйти из меню настроек, два раза нажав кнопку MENU. Нажать кнопку ОК на текущем канале и убедиться, что список каналов отредактирован.

Также можно убедиться, что отредактирован и список транспондеров и спутников.
Программирование закончено.
Но ведь мало только физически подсоединить устройство к компьютеру, нужно еще и наладить обмен данными между ними. Как же выбрать порт и организовать подключение? Несколько лет назад стандартным решением было использование COM-порта. Кстати, до сих пор различные специалисты доустанавливают на промышленные компьютеры по 8, по 16, а то и по 32 COM-порта (есть целая категория различных PCI-плат расширения последовательных портов, контроллеров и т. д.). Таким образом, если нужно подключить несколько внешних устройств с интерфейсом RS-232, могут потребоваться дорогие адаптеры и экзотические платы расширения, которые по старой традиции неделями плывут в Россию на пароходах. Кстати, название обычного переходника «адаптер DB9m/DB25f» у менеджера компьютерного магазина может вызвать разве что раздражение.
Что такое HID-устройство
Сейчас практически все устройства подключаются к компьютеру через USB-интерфейс. Поэтому во многих новых ПК COM-порт отсутствует вообще.
USB-интерфейс - типовое решение по сопряжению нового внешнего устройства с компьютером, точнее, это HID-интерфейс, базирующийся на протоколе USB 1.1.
Хотя многие и считают, что HID-интерфейс (Human Interface Device) предназначен исключительно для клавиатуры, мыши и джойстика, он годится для множества решений, связанных с сопряжением внешних устройств и компьютера.
Если пользователю необходимо производить низкоскоростной обмен данными (до 64 кбит/c) и при этом желательно сократить время на утомительной разработке собственных драйверов, то ему вполне подойдет HID. На выходе же получится простое и вполне современное решение на базе стандартного программного USB-интерфейса с гарантированной поддержкой на всех распространенных программных платформах.
Свойства HID-устройства
С точки зрения организации программной поддержки HID-устройства, все выглядит достаточно привлекательно: для работы под управлением Windows можно быстро создавать понятный компактный код на базе готовых проверенных алгоритмов. При этом у разработчика останется масса времени на реализацию собственного протокола обмена данными верхнего уровня, поскольку необходимый уровень абстрагирования уже организован за счет HID-протокола (см. таблицу). Кроме того, программисту легко проводить отладку написанного протокола обмена (разумеется, при наличии работающего HID-устройства) - благодаря относительной жесткости самого протокола достаточно просто разработать программу поддержки устройства компьютером. Еще бы! Массу работы уже взял на себя создатель HID-устройства.
Организация обмена данными между HID-устройством и компьютером
Чтобы описать взаимодействие HID-устройства с компьютером, употребим термин «хост». В данном случае под ним понимается управляющее устройство в общей физической архитектуре взаимодействия по USB-протоколу. Так, все порты в компьютере - хосты. К ним можно подключать различные USB-устройства (флэшки, мыши, веб-камеры, фотоаппараты и проч.), которые хоста не имеют. Хост обеспечивает обнаружение, подключение, отключение, конфигурирование устройств, а также сбор статистики и управление энергопотреблением.
HID-устройство может само установить частоту опроса, во время которого выясняется наличие в нем каких-либо новых данных. Значит, даже на таком низком уровне программист может довериться системе, поскольку частота опроса и другие параметры обмена данными должны быть заранее заданы в программе контроллера HID-устройства. Этим протокол HID отличается от общего описания USB 1.1 или USB 2.0, в котором нет жестких требований к организации протокола. Однако при специфических задачах, требующих повышенного уровня безопасности, может оказаться довольно сложно избавиться от циклических опросов, когда постоянно передаются почти одни и те же блоки данных.
Особенности программирования HID-устройств
HID-устройства имеют специальные дескрипторы. Когда хост определит, что устройство принадлежит к классу HID, он передает управление им соответствующему драйверу. Предполагается, что дальнейший обмен данными ведется под его руководством.
В Windows за доступ к HID-устройствам отвечает системная служба HidServ. Подробнее о функциях запросов к HID-устройствам и других особенностях работы с HID-драйвером рассказывается в работе П. В. Агурова «Интерфейс USB. Практика использования и программирования» (СПб.: БХВ-Петербург, 2005).
Программирование HID-устройств на «верхнем уровне»
Нелегкую жизнь «прикладных» программистов, работающих на Паскале, облегчает проверенный модуль HID. PAS, программная оболочка для hid. dll (Hid User Library - как указано в свойствах файла). В комментариях к файлу сообщается, что в основе его лежат модули hidsdi.h и hidpi.h корпорации Microsoft. А сам файл HID. PAS - часть пакета JEDI ().
Для работы с HID-устройством в среде Delphi for win32 применяется компонент TJvHidDeviceController, представляющий собой удобный глобальный менеджер для доступа к HID-устройствам. А уже на его базе можно получить объектный экземпляр для работы с конкретным устройством.
Основные свойства и события компонента TJvHidDeviceController
Рассмотрим компонент TJvHidDeviceController более подробно. Событие OnArrival срабатывает на поступление (подключение) в систему HID-устройства, доступ к устройству предоставляется в обработчике этого события через экземпляр класса TJvHidDevice. Простое событие OnDeviceChange реагирует на изменение состояния устройства, оно только сигнализирует об изменениях в системе. Событие OnDeviceData срабатывает при поступлении данных от одного из HID-устройств и передает обработчику следующее: HidDev: TJvHidDevice; - устрой-ство, от которого были получены данные;
Событие OnDeviceDataError уведомляет об ошибке передачи данных, передавая в процедуру обработки параметры HidDev: TJvHidDevice; - HID-устройство и Error: DWORD; - код ошибки. Событие OnDeviceUnplug уведомляет об извлечении устройства из списка установленных в системе. Типы обработчиков событий на Plug и Unplug одинаковы (в исходном тексте: TJvHidUnplugEvent = TJvHidPlugEvent). В обработчик передается объект класса TJvHidDevice, соответствующий HID-устройству.
Для последовательного перечисления имеющихся в системе HID-устройств по вызову метода Enumerate предназначено событие OnEnumerate, т. е. в обработчике события найденные устройства последовательно передаются в виде объектов. Это событие принудительно инициируется методом Enumerate, использующимся для «проведения» имеющихся HID-устройств через обработчик, например при ревизии состояния HID-устройств по инициативе хоста (компьютера).
Событие OnRemoval срабатывает на физическое извлечение устройства из системы и имеет тот же тип обработчика TJvHidUnplugEvent, что и для OnDeviceUnplug. Функция CountByProductName выдает количество устройств, удовлетворяющих указанному в аргументе имени продукта, а CountByVendorName - указанному в аргументе имени производителя.
Основные свойства и события класса TJvHidDevice
Класс TJvHidDevice - виртуальное представление отдельно взятого HID-устройства. Новый объект этого класса можно получить, как было уже сказано, из события OnArrival или OnEnumerate. Функционал классов TJvHidDeviceController и TJvHidDevice частично дублируется, поскольку в первом из них интегрированы общий инструментарий для работы с набором имеющихся в системе HID-устройств и механизм доступа к одному из них. Устройство можно однозначно идентифицировать по свойствам SerialNumber, ProductName и VendorName. Чтобы получить сведения о поступлении данных с применением такого объекта, можно воспользоваться событием OnData. Отсылка данных ведется через метод WriteFile (в строгом смысле - через функцию). WriteFile - это оболочка системной функции WriteFile (kernel32).
Чтобы проконтролировать факт извлечения устройства, следует присвоить свой обработчик событию OnUnplug. Перед началом обмена данными с HID-устройством нужно удостовериться в самой возможности такого обмена с помощью HasReadWriteAccess. В этом классе на возникновение ошибки обмена данными даже есть отдельное событие OnDataError.
А теперь рассмотрим фрагменты кода из «живого» проекта, реализующего тестовое клиентское приложение для организации обмена данными с нестандартным устройством - пластиковыми чип-картами на базе HID. В борьбе за реализм автор взял на себя смелость не выкидывать из листингов «лишние» технологические обвязки кода.
Метод ScanDevices (листинг 1) предназначен для инициирования процесса поиска в системе необходимого HID-устройства. Большая часть кода, за исключением вызова метода Enumerate, необязательна и обеспечивает гибкость приложения, например, для того, чтобы в эту же тестовую программу можно было добавить возможность работы по интерфейсу, отличному от HID. Метод AddError выводит в окно отладочную информацию в процессе работы программы.

В листинге 2 приведен обработчик события OnEnumerate для поиска необходимого внешнего устройства. Для простоты будем считать, что программа может работать только с одним устройством нужного ей типа.

Прежде чем рассматривать дальнейшую реализацию проекта, следует немного рассказать о принятом формате обмена данными верхнего уровня, т. е. о структуре, призванной быть посредником между методами приема-передачи данных и конкретной решаемой прикладной задачей. Дело в том, что здесь разработчику предоставляется возможность реализовать свои творческие способности. Вернее, разработчикам, потому что процесс создания нового протокола очень часто бывает двусторонним, и при этом первую скрипку играет тот, кому труднее реализовывать алгоритм обмена. В общем, каким бы ни был протокол обмена, всегда приятно делать каждую программную сущность максимально наглядной и самодостаточной, пусть даже в ущерб некоторым общепринятым традициям. Ибо лучшее решение - то, которое будет реализовано в сжатые сроки с минимальной привязкой к программной среде и с большими возможностями дальнейшего развития. На основе этих принципов был создан протокол обмена верхнего уровня, где главное понятие - «команда». Из листинга 3 видно, насколько автор любит строковые данные, не раз спасавшие его при отладке программных модулей. Как же замечательно, что у нас вообще есть тип String! Все команды протокола делятся на категории (классы), внутри которых существует код команды, однозначно характеризующий ее назначение. Параметр edParam служит для отсылки данных в устройство, а параметр edAnswerData содержит в себе полученные от устройства данные. Строковый тип описанных членов записи позволяет свободно и наглядно манипулировать данными в формате HEX-строки. И что самое приятное, формат описанной записи идеологически стоит где-то посередине между ее непосредственным назначением и различными формами ее представления (INI, HEX, XML и т. д.)

Выполнение команды, т. е. отсылка данных в устройство, реализовано с применением отсылки пакетов данных длиной 8 байт (листинг 4). Эта длина - не единственное решение, такой выбор продиктован требованиями протокола верхнего уровня и в каждом конкретном случае может быть другим. Это, что называется, дело вкуса. Странный флаг IsUSBMode в методе ExecuteCommand (листинг 5 на «Мир ПК-диске») оставлен как напоминание о том, что вместо работы с USB нам может потребоваться использовать COM-порт или какой-то другой интерфейс. В начале отсылаемой группы данных в устройство передается синхросерия произвольно выбранного формата (например, 3E3E3E2B), сообщающая устройству, что у него на входе вполне легальные данные. Напомню, что в данном случае речь идет не столько о HID, сколько о специфическом протоколе верхнего уровня, идеологически оторванном от «железа» и предназначенном для решения особых прикладных задач.
В обработчике GetDataExecutor полученных от устройства данных (пакет по 8 байт) использовано специально созданное событие OnNewInputData для передачи первично обработанных данных на дальнейшую обработку, причем с указанием их старого и нового значений (листинг 6 на «Мир ПК-диске»). Таким образом, события поступления необработанных данных и указание на дальнейшую обработку развязываются, позволяя добавлять какой-то специфический алгоритм предупреждения на раннем этапе ошибочной, повторной или ненужной входной информации.
Представленные здесь примеры работы с HID-устройством иллюстрируют общую идею статьи - относительную простоту программирования нестандартных HID-устройств средствами Delphi.
Начнем с минимума:include 18f2455 -- библиотека для используемого МК
--
enable_digital_io () -- переключение всех входов на цифровой режим
--
alias Button is pin_B7 -- раз уж у нас подключена кнопка, объявим ее
pin_B7_direction = input -- кнопка у нас работает на вход
--
-- одна строчка - и у нас есть все необходимое для работы с USB CDC
include usb_serial -- бибилотека для работы с usb
--
usb_serial_init () -- --инициализируем USB CDC
forever loop -- основной цикл, выполняется постоянно
usb_serial_flush () -- обновление usb. Данная процедура выполняет все необходимые
-- действия для поддержания соединения с ПК
end loop
Скомпилировав данный код, записав полученный HEX файл в МК при помощи бутлоадера и запустив устройство можно будет наблюдать как в системе опрделится новое устройство: Виртуальный сom-порт.

Теперь, когда устройство уже работает, научим его общаться.
Для чтения принятого байта существует функция usb_serial_read(byte) :boolean. При наличии полученного байта она заносит его в указанную переменную и возвращает true , иначе возвращает false .
Для отправки байта существует процедура usb_serial_data . Она замаскирована под переменную, потому для отправки байта достаточно присвоить ей значение отправляемого байта.
Объявим переменную размером в байт до основного цикла, в основном цикле будем проверять наличие полученных байт, и при их наличии отправлять их обратно.
include 18f2455
--
enable_digital_io ()
--
alias Button is pin_B7
pin_B7_direction = input
--
--
include usb_serial
--
usb_serial_init ()
var byte ch -- объявляем переменную
forever loop -- основной цикл
usb_serial_flush ()
if (usb_serial_read (ch )) then -- если байт получен, он будет записан в ch
usb_serial_data = ch -- отправляем полученный байт обратно
end if
end loop
Компилируем, зажимаем кнопку, передергиваем питание, запуская бутлоадер, меняем прошивку, запускаем.
Устройство снова определилось в системе, теперь нам нужен софт, дабы протестировать работу устройства.
Пока у нас нет своего, используем готовый терминал: я использовал программу RealTerm.
Открываем порт с нужным номером и отправляем данные.

И нам в ответ приходит то, что мы отправили. Значит, все работает как надо.
Софт
Итак, наш микроконтроллер умеет принимать байты и тут же отправлять их обратно. Теперь напишем свой софт для общения с ним (я буду использовать Delphi).Создаем новый проект, раскидываем по форме необходимые компоненты:
SpinEdit1 - для указания номера порта
Button1 - для установки соединения
Button2 - для разрыва соединения
SpinEdit2 - для ввода байта в десятичном виде
Button3 - для отправки байта
Memo1 - для вывода принятой информации.
Как уже было сказано выше, с com-портом нужно работать так же, как и с обычным текстовым файлом: используя функции CreateFile, WriteFile и ReadFile.
Дабы не вдаваться в подробности, возьмем готовую библиотеку для работы с com-портом: ComPort.
Вешаем на каждую кнопку необходимую задачу и получаем конечный код:
unit Unit1;interface
Uses
Windows, Messages, SysUtils, Variants, Classes, Graphics , Controls, Forms,
Dialogs, StdCtrls, Spin,ComPort;Type
TForm1 = class (TForm)
SpinEdit1: TSpinEdit;
Button1: TButton;
Button2: TButton;
SpinEdit2: TSpinEdit;
Button3: TButton;
Memo1: TMemo;
procedure OnRead(Sender: TObject; ReadBytes: array of Byte );
procedure Button1Click(Sender: TObject);
procedure Button2Click(Sender: TObject);
procedure FormDestroy(Sender: TObject);
procedure Button3Click(Sender: TObject);
private
{ Private declarations }
Port: TComPort;
public
{ Public declarations }
end;var
Form1: TForm1;
num: integer;
implementationProcedure TForm1.Button1Click(Sender: TObject);
begin
Port:= TComPort.Create(SpinEdit1.Value, br115200); //создаем соединение
Port.OnRead:= OnRead; //создаем поток чтения принятых данных
Button2.Enabled:= true ; //активируем кнопку закрытия соединения
end;Procedure TForm1.Button2Click(Sender: TObject);
begin
Port.Free; //закрываем соединение
Button2.Enabled:= false ; //отключаем кнопку
end;Procedure TForm1.Button3Click(Sender: TObject);
begin
if Button2.Enabled then Port.Write();
end;Procedure TForm1.FormDestroy(Sender: TObject);
begin
if Button2.Enabled then
Port.Free;
end;Procedure TForm1.OnRead(Sender: TObject; ReadBytes: array of Byte );
var
i:integer;
begin
for i:= Low(ReadBytes) to High(ReadBytes) do //проходим по массиву принятых байт
begin
Memo1.Text:= Memo1.Text + "." +InttoHex(ReadBytes[i],2); //добавляем его HEX значение в окно
inc(num); //считаем колв-о принятых байт
end;
if num > 10 then begin
Memo1.Lines.Add("" ); //переносим строку
num:= 0;
end;
end;
Запускаем, устанавливаем соединение, отправляем байты:

Вот и готов наш самый простой терминал для работы с самым простым usb-устройством.
Как видно, чтение и запись происходит динамическими массивами байт.
Обрабатывая получаемую информацию можно составить необходимый протокол обмена, подходящий для текущей задачи.
include 18f2455
--
enable_digital_io ()
--
alias Button is pin_B7
pin_B7_direction = input
--
--
include usb_serial
--
usb_serial_init ()
var byte ch
var byte i -- объявляем вторую переменную
forever loop -- основной цикл
usb_serial_flush ()
if (usb_serial_read (ch )) then -- если байт получен выполняем необходимые действия
case ch of -- перебираем номер байта
0 : usb_serial_data = 0xff
1 : usb_serial_data = Button -- отправка состояния кнопки
OTHERWISE block -- если получено что-то иное
for 16 using i loop -- отправляем 10 байт с данными
usb_serial_data = ch +i -- от ch до ch+15
end loop
end block
end case
end if
end loop
Дополнительные возможности
Если на этом остановиться, получится обычная статья с подробным описанием примера использования библиотеки, коих на просторах сети достаточно. Потому добавлю немного более углубленной информации.Упрощение отправки данных
Отправлять информацию по одному байту - не всегда удобно. Очень часто может пригодиться библиотека print . Она содержит процедуры по отправке данных всевозможной длины всевозможными форматами: byte,hex,dec,bin,boolean что может упростить вывод данных в программе.>include print
...
var dword data
print_dword_hex (usb_serial_data , data )
Название всех команд можно посмотреть в файле библиотеки.
Ожидание подключения к ПК
Если перед стартом основного цикла микроконтроллера необходимо предварительно установить соединение с ПК, то можно дописать перед ним строчкиwhile (usb_cdc_line_status () == 0x00 ) loop
end loop
Привязываем к устройству номер порта
Если оставить все как есть, система при каждом новом подключении будет выделять первый свободный номер порта. А это значит что за ним придется всегда следить.Для того, что бы этого не происходило, необходимо устройству присвоить уникальное значение серийного номера до подключения библиотеки usb:
Номер может быть любой длины и содержать различные символы.
const byte USB_STRING3 =
{
24 , -- длина массива
0x03 , -- bDescriptorType
"0" , 0x00 ,
"1" , 0x00 ,
"2" , 0x00 ,
"3" , 0x00 ,
"4" , 0x00 ,
"5" , 0x00 ,
"6" , 0x00 ,
"7" , 0x00 ,
"8" , 0x00 ,
"9" , 0x00 ,
"X" , 0x00
}
Меняем имя устройства на свое
Поменять имя устройства, видимое в системе до установки драйверов можно объявив массив с именем, как и серийный номер, это необходимо сделать до подключения библиотеки USB.const byte USB_STRING2 =
{
28 , --
0x03 , -- bDescriptorType
"D" , 0x00 ,
"e" , 0x00 ,
"m" , 0x00 ,
"o" , 0x00 ,
" " , 0x00 ,
"B" , 0x00 ,
"o" , 0x00 ,
"a" , 0x00 ,
"r" , 0x00 ,
"d" , 0x00 ,
" " , 0x00 ,
"=" , 0x00 ,
")" , 0x00
}

Но увы, после установки драйверов устройство поменяет имя на указанное в.inf файле, потому поменяем имя и там
DESCRIPTION=«Demo CDC»

Организуем автоподключение устройства
Увы, никаких прямых путей выполнить данную задачу нет, потому придется исхитриться.Прежде всего необходимо присвоить своему устройству уникальное значение производителя и продукта, дабы легко определять его среди сотен других стандартных CDC-прошивок.
VID и PID выдаются за денюжку, потому пойдем по пуути китайцев: втихую возьмем себе заведомо свободные значения.
Прошивка:
В прошивке необходимо объявить две переменные до подключения библиотеки USB
const word USB_SERIAL_PRODUCT_ID = 0xFF10
const word USB_SERIAL_VENDOR_ID = 0xFF10
Вместо FF10 можно вставить любые два слова (2 байта). Конечный результат содержится в прилагаемом архиве.
Драйвера:
Так как драйвера не предназначены для нашей комбинации VID и PID, допишем наши значения в.inf файл вручную:
%DESCRIPTION%=DriverInstall, USB\VID_FF10&PID_FF10
%DESCRIPTION%=DriverInstall, USB\VID_FF10&PID_FF10
Софт:
Для отлова событий подключения\отключения устройства подключим библиотеку ComponentUSB. Не считаю нужным пояснять каждую строчку: все изменения можно увидеть в прилагаемом проекте.
Результат
На скриншоте сложно разглядеть, но кнопка отправки активна только в момент наличия подключенного устройства, при этом каждые 50мс программа подает запрос на получение состояния кнопки (что, впрочем, неправильно, потому как нажатие кнопки должно обрабатываться на МК).
Как видно, организовать обмен данными между МК и ПК через USB - не самое сложное занятие. Полученное соединение можно использовать не только для конечынх целей: оно так же подходит для отладки программы. Ведь отправить на компьютер результаты расчетов, текущие состояния регистров и переменных куда нагляднее, чем моргать парой светодиодов азбукой морзе.
И напоследок: советую заглянуть в исходный код лампы настроения. Там можно найти довольно-таки хороший вариант обработки принимаемых данных для организации удобного протокола обмена.
Как уже упоминалось, операционные системы Windows обеспечивают программную под держку функционирования устройств, подключенных к шине USB. Обработку потоков данных устройств USB на уровне операционной системы выполняет стек стандартных драйверов, которые выполняют основные функции по управлению всеми устройствами USB и обмену данными между ними и системой.
Если вам необходимо написать программное обеспечение для какого либо устройства USB, которое расширяло бы его возможности по обработке данных, то можно избрать один из трех возможных путей:
написать собственный драйвер устройства, который бы обеспечивал все необходи мые функции управления и обмена данными, и программу, которая бы взаимодей ствовала с этим драйвером в пользовательском режиме. При этом можно полностью обойтись без стандартных драйверов системы;
написать драйвер фильтра, который бы обеспечивал требуемую функциональность, но располагался бы в стеке драйверов над системными драйверами. Таким образом, все стандартные функции обработки выполняли бы драйверы USB, установленные системой, а дополнительные функции обеспечивались бы вашим драйвером фильтра, с которым и взаимодействовала бы программа пользователя;
воспользоваться свободно распространяемыми библиотеками функций и драйвера
ми для доступа к USB устройству.
В большинстве случаев программный доступ к устройству USB может потребоваться, если данное устройство выполняет какую то очень специфичную функцию. Например, на базе USB разработаны «электронные осциллографы» или системы сбора данных, для работы с которы ми необходимо иметь доступ к самому устройству. В большинстве таких случаев можно вос пользоваться свободно распространяемыми библиотеками функций, которые будут работать практически во всех популярных средах программирования. Например, под эгидой GNU раз работано программное обеспечение, известное под названием LibUsb, включающее необхо димые драйверы и библиотеки функций для работы в операционных системах Windows и Linux. Эти библиотеки функций очень популярны и позволяют быстро разрабатывать про граммы, взаимодействующие с вашим устройством посредством набора стандартных функ ций. Это исключает необходимость написания собственного драйвера устройства, что суще ственно экономит время.
Кроме того, большинство пользователей не знакомо с методикой разработки драйверов,
а это очень сложная область программирования, поэтому наличие такого свободно распрос траняемого программного обеспечения окажет неоценимую помощь широкому кругу пользо вателей. На основе проекта LibUsb разработаны оболочки (wrappers) для работы с Visual Basic .NET и C# .NET, наиболее популярной из которых является LibUsbDotNet, также разра ботанная под эгидой свободно распространяемого программного обеспечения. Несмотря на кажущуюся сложность программирования USB устройств, перечисленное программное обес печение настолько упрощает эту задачу, что она становится под силу даже новичкам. Рас смотрим на практических примерах, как работать с вашими USB устройствами, и начнем с пакета программ LibUsb. Кстати, вышеперечисленное программное обеспечение можно бес платно загрузить с сайта www.sourceforge.net или из многочисленных дублирующих сайтов.
Как работать с библиотеками USB функций LibUsb? Библиотека построена таким обра
зом, чтобы можно было выполнять основные операции, связанные с USB устройством:
идентификацию или, по–другому, перечисление (enumeration). При выполнении этой операции происходит обнаружение устройств, подключенных к шине USB, что выпол няется с помощью соответствующих функций библиотеки libusb;
получение параметров устройства (идентификаторов устройства, данных о произво дителе и характеристиках устройства), для чего в библиотеке имеется целый ряд функций;
открытие, закрытие, чтение и запись данных, посылка команд. К устройству USB, так же, как и к другим объектам файловой системы, можно обращаться по записи чте нию, что и выполняется с помощью соответствующих функций библиотеки.
Все перечисленные возможности могут быть реализованы посредством вызова соответ ствующих функций библиотеки libusb, но здесь они не будут перечисляться, поскольку это заняло бы слишком много места; мы посмотрим, как использовать некоторые из этих функ
Рис. 6.10
Расположение драйвера libusb0.sys в стеке драйверов устройства
ций на практических примерах. Описание всех функций читатели смогут найти в со ответствующей документации. Напомню, что мы рассматриваем применение функций биб лиотеки libusb в операционных системах Windows.
При инсталляции дистрибутива с libusb в операционной системе Windows в системе инсталлируется драйвер фильтра libusb0.sys. Этот драйвер будет находиться в вершине сте ка драйверов системы, что легко увидеть, на пример, посмотрев сведения о драйверах для любого USB устройства (рис. 6.10).
Кроме того, для обращения к драйверу из программ пользователя в систему инсталли руется библиотека libusb0.dll, используя кото рую можно разрабатывать пользовательские программы.
Рис. 6.17
Вид окна приложения при удалении
USB устройства из системы